近日,清华大学航天航空学院研制出一种微型攀爬机器人(9.420, -0.08, -0.84%),能在不同形貌表面攀爬,还可以在两种不同表面之间过渡。
受浮游生物水螅多种运动步态的启发,研究人员通过对可变刚度“智能关节”的控制,实现了机器人在步进、“翻筋斗”前进和翻转过渡三种运动步态之间的按需切换。最终,机器人可以在不同材质、不同粗糙度、不同形貌墙面攀爬,并在两种不同墙面之间过渡。
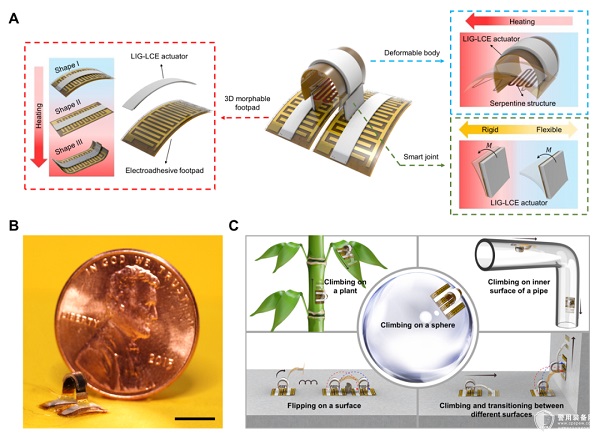
研究人员提出了电压驱动3D软致动器的设计策略和制造技术,该技术可以在小尺度下、在不同配置之间可逆地变形。这些发展为软微型机器人提供了路线,可以根据需要改变其3D形状,演示了其能够在平面和曲面上攀爬并在不同表面之间转换,可以经历各类管道、齿轮等曲面结构,并且能够通过指令到达指定位置进行故障检测等任务。
这项研究的课题组成员张一慧介绍,“解锁”了这一新技能后,该微型软体攀爬机器人可进入一些狭窄、复杂的环境中,代替人类执行探测等作业任务。例如在飞机发动机、炼油机等复杂系统中的勘探和检测方面具有巨大潜力。
新的研究开发了具有定制3D配置和主动刚度调节的电压驱动软小型致动器。在力学建模的指导下,液晶弹性体(LCE)中的编程应变分布和屈曲驱动3D组件的组合允许在毫米尺度(从1到10mm)下进行电压驱动的复杂3D到3D形状变形(弯曲角度>200°),这是以前无法实现的。这些软致动器能够开发出可变形的电粘性脚垫,该脚垫能够适应不同的曲面和刚性可变的智能关节,从而在单个微型机器人中实现不同的运动步态,能够在多平面环境下前进,到达指定位置。


访谈
更多护航视频监控网络安全 做物联网安全的守护者 ——专访天防安全总经理段伟恒
在万物互联时代,网络安全的重要性日益凸显,尤其在快速发展的城市建设中,搭建的巨大物联网络对其安全保障…
做行业赋能者 HID迎接数字化浪潮新机遇 破解新挑战
今年3月份,全球可信身份解决方案提供商HID发布了最新的《安防行业现状报告》(以下简称“报告”),该报告…
数字化浪潮下,安防厂商如何满足行业客户的定制化需求?
回顾近两年,受疫情因素影响,包括安防在内的诸多行业领域都遭受了来自市场 “不确定性”因素的冲击,市场…