随着无人机性能水平提高,无人机在民用类和军事类活动中的使用越来越广泛。由于无人机飞行环境和任务难度不同,单架无人机因为自身动力和负荷能力很难独自完成任务,无人机集群协同作业则是当前科技现代化的任务要求。集群协作有效提高整体工作效能,实现单体性能到群体性能的提升,进而实现群体智能。
一、国内外对群体智能技术的研究现状
国外对群体智能技术的研究侧重于整体性研究,主要针对集群结构框架、控制与优化技术、任务管理与协同等开展研究工作。如美国国防部高级研究计划局主导的自主编队混合控制项目(MICA),对协同任务分配、协同路径规划、混合主动与自主编队控制、协同跟踪、信息共享等有关无人机集群的技术进行了全面的研究。
国内对无人机系统的协同感知与信息共享、路径实时规划、自主编队与编队重构、智能协同决策等研究较为深入。集群中融合了视觉技术、UWB 技术、激光雷达技术及 GPS RTK 技术等,在理论仿真与实机验证方面均有所突破。中国电子科技集团、浙江大学已经开展了集群飞行的实践研究,且不完全依赖地面站。如近期来自浙江大学湖州研究院的论文《Swarm of micro flying robots in the wild》登上了《Science Robotics 》的封面,其无人机集群穿越竹林的视频更是引起广泛地关注,其设计的无人机也是集UWB、双目视觉等技术与一身。
二、群体智能在协同定位技术上存在的问题
然而,面对群体智能的实际应用,群体智能技术的未来发展还要解决研发过程中的技术挑战问题,主要体现在集群的自主性、协同性和算法智能性等方面。对于集群技术而言,智能单体间的信息共享是集群技术至关重要的一环。充分利用网络节点资源实现信息共享的集群协同技术能够优化系统性能,尤其适用于无中心的无线通信网络。自主性与协同性是群体智能的基础,在单体自主已经得到飞速发展的情况下,群体自主与协同成为群体智能发展的关键技术之一。
而无论是自主性还是协同性,协同定位技术作为一项集群的基础服务技术都是不可忽视的关键技术之一,面对未来群体智能的趋势需求,目前的群体智能在协同定位技术上主要还存在如下两个方面的问题:
问题一:
面向实战的群体智能协同关键技术的研究并不多见,尤其是 GPS/北斗拒止条件下,如何不依赖基础设施进行位置协同尚待研究。
问题二:
集群尚未真正群体智能化,以地面站作为主控的方式进行多机协同,本质上还没有脱离对传统集群技术的依赖,去中心化群体智能协作技术还有待进一步研究。
上述问题是群体智能协同技术的关键问题,从技术的角度看,群体自主与协同需要单体间具有良好的自主感知能力,减小对集中调度的依赖。而实现高精度的位置协同是群体智能协同的基础,群体智能中的智能单体需要通过视觉、通信、激光雷达等技术手段实现自定位功能,具有障碍感知能力和决策能力来规避碰撞,最大限度地实现单体运动位置的自主决策。
三、基于UWB定位技术的无人机集群协同
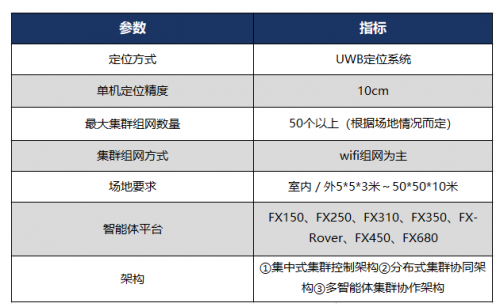
针对以上问题,飞思实验室从集群协同平台实现的角度,基于UWB定位技术,进行集群协同平台设计,提出分布式方案以解决集群协同问题。目的在于使用UWB技术搭建集群协作平台,更利于用户探究实现群体智能的新方法,完善群体智能理论,扩展群体智能的应用范围。
UWB定位系统下集群编队系统主要应用于室内与室外快速搭建可移动的多智能体集群技术验证,具有快速搭建、移动便捷、飞行方便,测试成本低,测试效率高等优点。同时可进行虚拟结合仿真,快速实现大范围、复杂环境智能体集群技术验证。
该系统在室内或者室外空间合理布置并安装UWB基站(Anchor),构成无人飞行器的飞行定位坐标空间,完成基准坐标系的建立,同时该基准坐标系还支持与当地坐标系之间进行相互转换;与此同时无人飞行器上也搭载了UWB定位标签(Tag),通过与固定安装在室内空间中的UWB基站进行通信,即可实现无人飞行器自身的定位。
系统配备分布式控制地面站,具有无人机状态显示,无人机集群控制等各功能。可在线发送任务指令,具备:①飞机控制、②算法切换、③飞机数据展示等功能,支持二次开发。


访谈
更多护航视频监控网络安全 做物联网安全的守护者 ——专访天防安全总经理段伟恒
在万物互联时代,网络安全的重要性日益凸显,尤其在快速发展的城市建设中,搭建的巨大物联网络对其安全保障…
做行业赋能者 HID迎接数字化浪潮新机遇 破解新挑战
今年3月份,全球可信身份解决方案提供商HID发布了最新的《安防行业现状报告》(以下简称“报告”),该报告…
数字化浪潮下,安防厂商如何满足行业客户的定制化需求?
回顾近两年,受疫情因素影响,包括安防在内的诸多行业领域都遭受了来自市场 “不确定性”因素的冲击,市场…